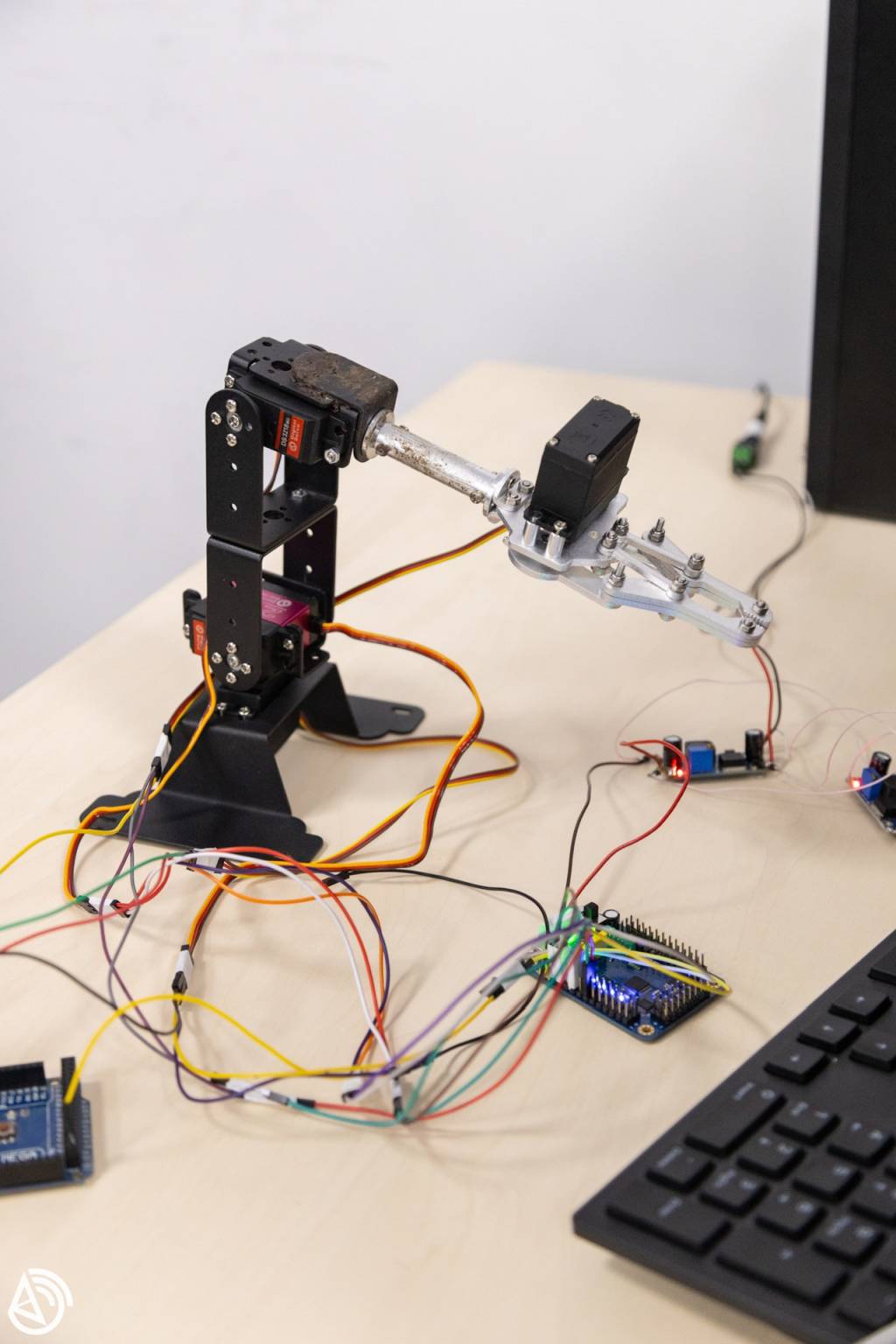
Студенты первого курса ИРТСУ Алексей Зонтов и Тимофей Сухов вместе с научным руководителем разработал высокотехнологичную конструкцию – робот-манипулятор, который способен взаимодействовать с различными объектами при помощи перемещения звеньев и рабочего органа. Конструкция «руки» манипулятора повторяет строение руки человека и состоит из платформы, плеча, локтя, запястья и рабочего органа, который напоминает человеческую кисть. Рабочий орган является ключевым элементом, так как от него зависит сфера применения манипулятора и под него разрабатывается соответствующая платформа.
Манипулятор может применяться в различных сферах, таких как машиностроительная, автомобильная, хирургия, тяжелая и химическая промышленность. Для перемещения «руки» манипулятора необходимы суставы, которые представлены в виде приводов. Выделяют три типа манипуляторов по видам приводов: гидравлические, пневматические и электрические.
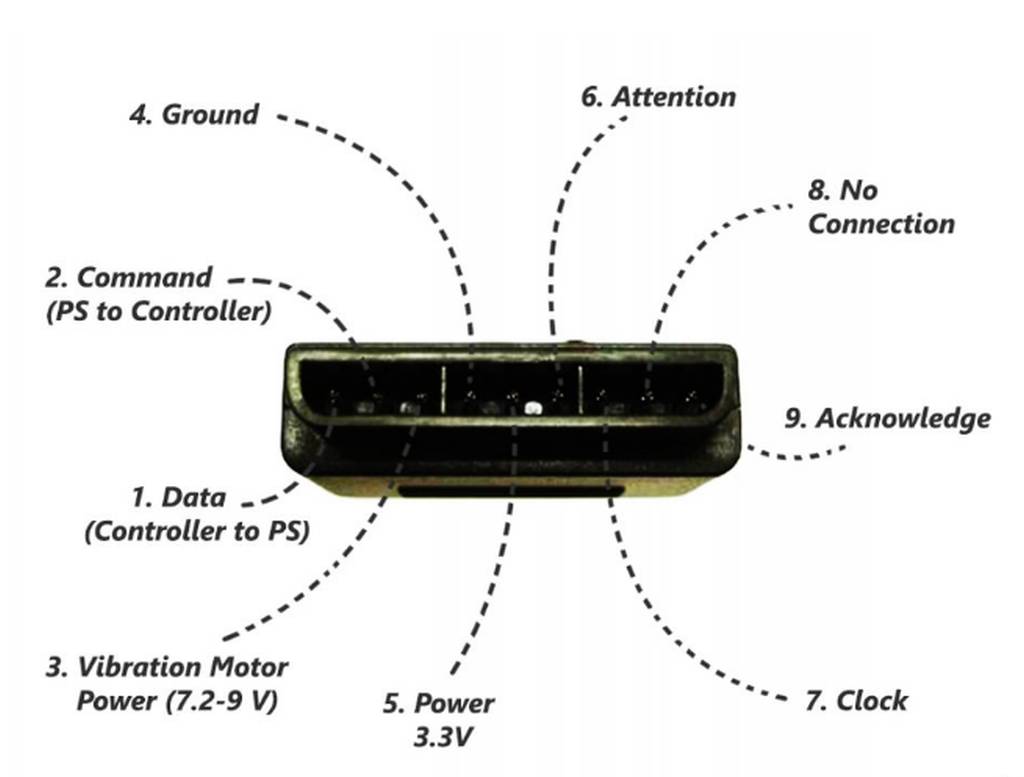
Исследуемая модель представляет собой четырехзвенный стационарный манипулятор с 4 степенями свободы и рабочим органом в виде клешни (схвата). На данный момент реализовано управление манипулятором по заданным координатам, управление при помощи геймпада, анализ и решение обратной задачи кинематики, а также анализ подключения камеры и проецирования изображения на экран со стенда.
Дальнейшие перспективы развития проекта включают реализацию системы обнаружения и анализа размеров препятствия на траектории перемещения рабочего органа при помощи камеры, закрепленной на стенде, а также реализацию управления манипулятором при помощи двух виртуальных джойстиков. Кроме того, планируется создание 3D модели, а также разработка гусеничной платформы для перемещения манипулятора и механизма планирования траектории для перемещения подвижной платформы в обход препятствий.
Манипулятор может быть применен в промышленности для перемещения объектов с возможностью выстраивания кратчайшей траектории, а также в спасательной сфере для производства исследовательских и поисковых работ в особо трудных условиях за счет подвижной платформы и рабочего органа.