Системы и комплексы
Приборы и устройства
Компоненты, детали и сборки
Программные решения
Методы и модели
| Автоматизированная система контроля цепей | |
|---|---|
 |
АСКЦ предназначена для автоматизированного измерения активного сопротивления и напряжения постоянного тока на соединителях космического аппарата. |
| Комплекс автоматической сигнализации приводнения | |
|---|---|
 |
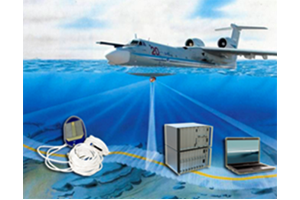
Предназначен для повышения безопасности амфибийной авиации при посадке и взлете с водной поверхности, а также при движении и стоянке на акватории. |
| Система автоматического управления следящим устройством летательного аппарата | |
|---|---|
| Предназначена для высокоточного перемещения в автоматическом и ручном режимах по пространственным координатам механического устройства летательного аппарата | |
| Бортовой радиолокационный измеритель параметров морского волнения | |
|---|---|
 |
Предназначен для измерения параметров и энергетического спектра морских волн, выполнена оценка эффективности синтезированных алгоритмов; разработаны требования и рекомендации по принципам построения бортовых радиолокационных измерителей параметров волнения. |
| Медицинский прибор для компьютерной диагностики патологий носовых и лобных пазух в базисе беспроводных телекоммуникационных технологий | |
|---|---|
 |
Предназначен для съема, многоканальной обработки диафонографического и рентгенографического изображений любой поверхности исследуемых параметров, автоматизированного экспертного анализа и выполнение консалтингового решения для врача. |
| АСОР | |
|---|---|
 |
Изделие ACOP представляет собой устройство для автоматического перехвата радиолокационных сигналов с высокой точностью и вероятностью определения пассивными методами основных параметров принимаемых сигналов, а также направления на излучающие РЛС в широком частотном диапазоне. |
| Автоматизированный пульт проверки цепей пиросредств | |
|---|---|
 |
Предназначен для проверки электрических цепей пиросредств в автоматическом и пошаговом режимах. |
| Источник стабилизированного питания | |
|---|---|
 |
Источник питания ИСБ 2,5К предназначен для использования в качестве имитатора солнечной батареи и источника стабилизированного напряжения или тока в наземных комплектах проверочной аппаратуры. |
| Модуль контроля корпуса | |
|---|---|
 |
Предназначен для автоматического измерения и контроля сопротивления между шинами питания и корпусом орбитального корабля при наличии напряжений 27В на шинах питания. |
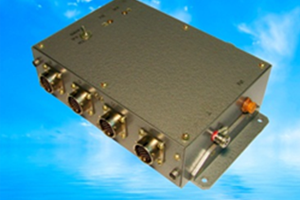
| Модуль управления коммутацией цепей силового питания | |
|---|---|
 |
Модуль МКП2 предназначен для подключения различных устройств к двум независимым двухпроводным цепям силового электропитания постоянного тока напряжением 27В, позволяет контролировать состояние сети, обеспечивает защиту от короткого замыкания и перегрузок по току и напряжению, осуществляет в каждой цепи питания: измерение и индикацию напряжения и тока, программирование уставок, допусковый контроль величины напряжения и другие вспомогательные функции. |
| Модуль сбора и предварительной обработки информации | |
|---|---|
 |
Модуль МСПОИ предназначен для использования в составе объектно-ориентированных устройств телемеханики контролируемых пунктов с программным управлением в качестве функционального модуля, осуществляющего функции телесигнализации. |
| Пульт контроля заправки | |
|---|---|
 |
Предназначен для контроля заправки (ПКЗ) топливом космических аппаратов (КА) путем выдачи команд открытия и закрытия клапанов при проведении заправки КА при пороговом контроле температуры шар-баллона. |
| Стабилизированный источник питания | |
|---|---|
 |
Источник питания СИП 0,6-28В предназначен для применения в качестве регулируемого источника стабилизированного напряжения в наземных комплексах проверочной аппаратуры. |
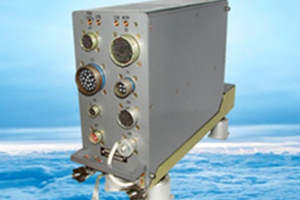
| Литерный блок контроля команд | |
|---|---|
 |
ЛБКК предназначен для приема из эфира кодовой последовательности СВЧ сигналов на одной из шести литерных частот с целью декодирования команд управления и записи их в цифровом виде в съемный USB флэш-диск в виде файлов сеансов, а также преобразования значений декодированных команд управления в аналоговые сигналы. |
| Модуль аналого–цифрового преобразования | |
|---|---|
 |
Предназначен для автоматического измерения различных аналоговых сигналов, преобразования результатов измерения в цифровую форму и передачу полученной информации на шину обмена с контролером ввода-вывода. |
| Имитатор ЗУР | |
|---|---|
 |
Имитатор ЗУР предназначен для контроля работоспособности аппаратуры изделия при проведении тестовых проверок. |
| Имитатор телесигнализации (ИТС) | |
|---|---|
 |
Имитатор телесигнализации (ИТС) предназначен для имитации потока информации о состоянии датчиков телесигнализации, поступающей при испытаниях орбитальных кораблей. |
| Модернизированный блок контроля наличия токов (БКНТ) | |
|---|---|
 |
Блок предназначен для контроля наличия токов управления исполнительных ячеек сложных объектов, управления состоянием цепей управления. |
| Блок электронный | |
|---|---|
 |
Блок электронный изделия 65СНЛ (БЭ 65СНЛ) обеспечивает формирование управляющих сигналов для гирокоординатора (ГК) и выдачу сигналов управления для исполнительных механизмов изделия 65СНЛ на основе обработки сигналов, поступающих от фотоприемного устройства (ФПУ), датчиков ГК, команд и данных, поступающих по магистральному последовательному интерфейсу, а также формирование сигналов телеметрии и напряжений электропитания для ФПУ, узлов и датчиков ГК. |
| Блок регистрации широкополосных сигналов | |
|---|---|
 |
Предназначен для накопления радиолокационных сигналов, отраженных от одиночных и групповых воздушных объектов |
| Сверхширокополосный радиолокатор для обнаружения биообъектов за оптически непрозрачными препятствиями | |
|---|---|
 |
СШП радиолокатор создан на базе георадара и предназначен для обнаружения биологических объектов за препятствиями из кирпича, бетона или армированного бетона при проведении поисково-спасательных работ и антитеррористических операций. |
| Многолучевой эхолот | |
|---|---|
 |
Предназначен для мониторинга подводной обстановки, проведения поисково-спасательных и гидрографических работ. |
| Локатор препятствий глубоководного носителя | |
|---|---|
 |
Предназначен для мониторинга подводной акустической обстановки в реальном масштабе времени по ходу движения носителя с целью предупреждения столкновения с подводными препятствиями, потенциально опасными для навигации. |
| Глубоководный гидроакустический модуль | |
|---|---|
 |
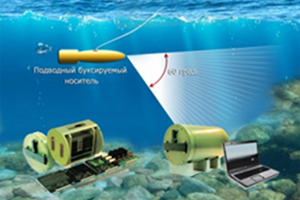
Предназначен для цифрового формирования простых и сложных зондирующих сигналов и цифровой обработки принятых эхосигналов ВЧ и НЧ гидролокаторов бокового обзора (ГБО) и акустического профилографа с целью высокоточного исследования глубоководных районов Мирового океана |
| Активный радиолокационный отражатель | |
|---|---|
 |
Макет активного радиолокационного отражателя (АРЛО), объединяющего пассивный излучатель электромагнитного поля (ЭМ) и негатрон — электронный прибор с отрицательным сопротивлением |
| Блок коммутации интерфейсов | |
|---|---|
 |
Предназначен для коммутации трех каналов видеосигналов, поступающих от двух вычислительных машин, а также сигналов клавиатуры и мыши. |
| Блок управления светодиодным модулем | |
|---|---|
 |
Предназначен для дистанционного управления величиной световых потоков двух светодиодных модулей. |
| Блок сопряжения интерфейсов | |
|---|---|
 |
Предназначен для обмена информацией с вычислительной машиной (ВМ) через один высокоскоростной оптический интерфейс с одной стороны и электронной аппаратурой с другой стороны. |
| Лабораторный стенд “Микроконтроллеры AVR” | |
|---|---|
 |
Стенд предназначен для проведения цикла лабораторных работ по дисциплинам: — основы микропроцессорной техники, — цифровая обработка сигналов, — электронные устройства систем управления, — локальные устройства автоматики, — интерфейсы микроконтроллерных и компьютерных систем, — компьютерное управление техническими объектами, — технические средства автоматики. Стенд может быть использован для оснащения учебных лабораторий вузов и среднеспециальных учебных заведений. |
| Объект интеллектуальной собственности | © Южный федеральный университет, © Иванов Ю.И., Югай В.Я. Разработчик: кафедра Систем автоматического управления ИРТСУ ЮФУ |
| Лабораторный стенд “Электронные устройства систем автоматики” (ЭУСА) |
|
|---|---|
 |
Стенд предназначен для проведения цикла лабораторных работ по дисциплине “Электронные устройства систем автоматики”: -исследование элементов устройств автоматики; — исследование функциональных преобразователей; — исследование способов управления силовыми полупроводниковыми приборами. |
| Объект интеллектуальной собственности | © Южный федеральный университет, © Иванов Ю.И., Югай В.Я. Разработчик: кафедра Систем автоматического управления ИРТСУ ЮФУ |
| Двухканальный интеллектуальный микропроцессорный модуль | |
|---|---|
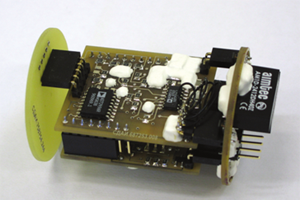 |
Предназначен для прецизионной цифровой обработки аналоговых сигналов, поступающих с элементов и устройств съема информации с технических объектов и технологических процессов. |
| Модуль приемо-излучающего многочастотного тракта гидроакустической аппаратуры | |
|---|---|
 |
Предназначен для использования в перспективных образцах гидроакустической аппаратуры, решающей задачи поиска и классификации малоразмерных объектов |
| Модуль сжатия и декодирования видеоинформации | |
|---|---|
 |
Предназначен для использования в охранных системах видеонаблюдения и системах передачи изображений по низкоскоростным каналам связи |
| Модуль регистрации радиолокационных сигналов | |
|---|---|
 |
Предназначены для накопления радиолокационных сигналов, отраженных от одиночных и групповых воздушных объектов |
| Модуль цифровой обработки сигналов (ЦОС) | |
|---|---|
 |
Предназначен для замены аналоговой системы селекции движущихся целей на цифровую. |
| Модуль преобразования сигналов управления (ПСУ) | |
|---|---|
 |
Предназначен для сопряжения блока обработки изображений с блоком системы наведения. |
| Модуль интерфейса системы индикации (ИСИ) | |
|---|---|
 |
Предназначен для приема и передачи сигналов и команд по параллельным линиям связи и интерфейсу Ethernet. |
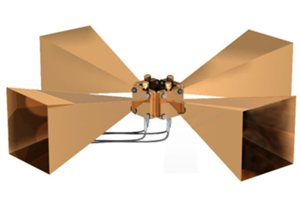
| Многомодовая волноводная решётка Ван-Атта | |
|---|---|
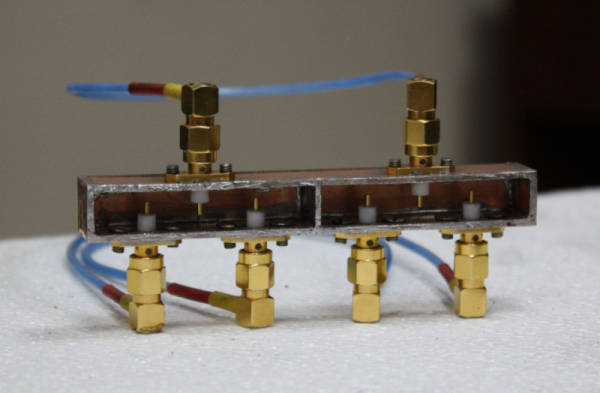 |
Предназначена для имитации ложных целей и радиолокационных ловушек. При этом достигаются следующие результаты: — дезориентация операторов РЛС и перегрузка вычислительных устройств контура (системы обработки информации); — увеличение времени на опознавание образа цели (определение истинных целей); — отвлечение ударных средств ПВО (истребителей, ракет) на поражение ложных целей. |
| Вертолетный программно-аппаратный комплекс | |
|---|---|
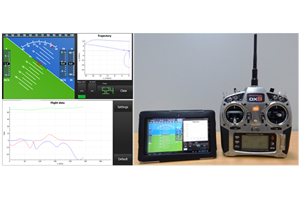 |
Программно-аппаратный комплекс предназначен для исследования характеристик и моделирования поведения летательных аппаратов. |
| Алгоритмы управления корректирующим приводом слежения | |
|---|---|
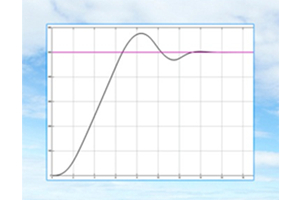 |
Алгоритмы управления предназначены для быстрой отработки случайных отклонений выбранного направления, вызываемых внешними факторами. Влияние внешних воздействующих факторов на параметры системы управления отслеживается с помощью процедуры автоматической идентификации. Она обеспечивает определение дискретной передаточной функции корректирующего привода. Синтез цифрового управляющего устройства, реализуемый на основе результатов идентификации, обеспечивает требуемое качество слежения |
| Метод пространственной мультисегментной аппроксимации характеристики преобразования датчика физических величин | |
|---|---|
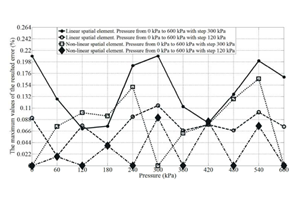 |
Метод предназначен для формирования прецизионных характеристик преобразования датчиков медленно меняющихся физических величин |
| Метод оценки сложности систем | |
|---|---|
 |
Метод определения степени сложности системы предназначен для исследования степени сложности систем технической, экономической и социальной направленности для выбора адекватных методов моделирования поведения систем и принятия управляющих решений |
| Метод прогноза изменения состояний сложной системы | |
|---|---|
|
Метод прогноза изменения состояний сложной системы предназначен для исследования поведения сложных систем технической, экономической и социальной направленности с применением класса моделей, соответствующих сложности системы и прогнозом изменения состояния сложной системы с применением экспертных знаний для последующего вывода нечеткого управляющего решения |
{kind=link}