Студент колледжа ППО ИРТСУ Владимир Петровский разработал мобильную платформу для разметки дорог, управляемую с помощью мобильного приложения.
Мобильная платформа для нанесения дорожной разметки является автономным устройством, предназначенным для автоматизированного нанесения краски на дорожное полотно. Такие платформы могут функционировать полностью автономно или управляться оператором, что позволяет эффективно использовать их как на парковках, так и на новых магистралях.
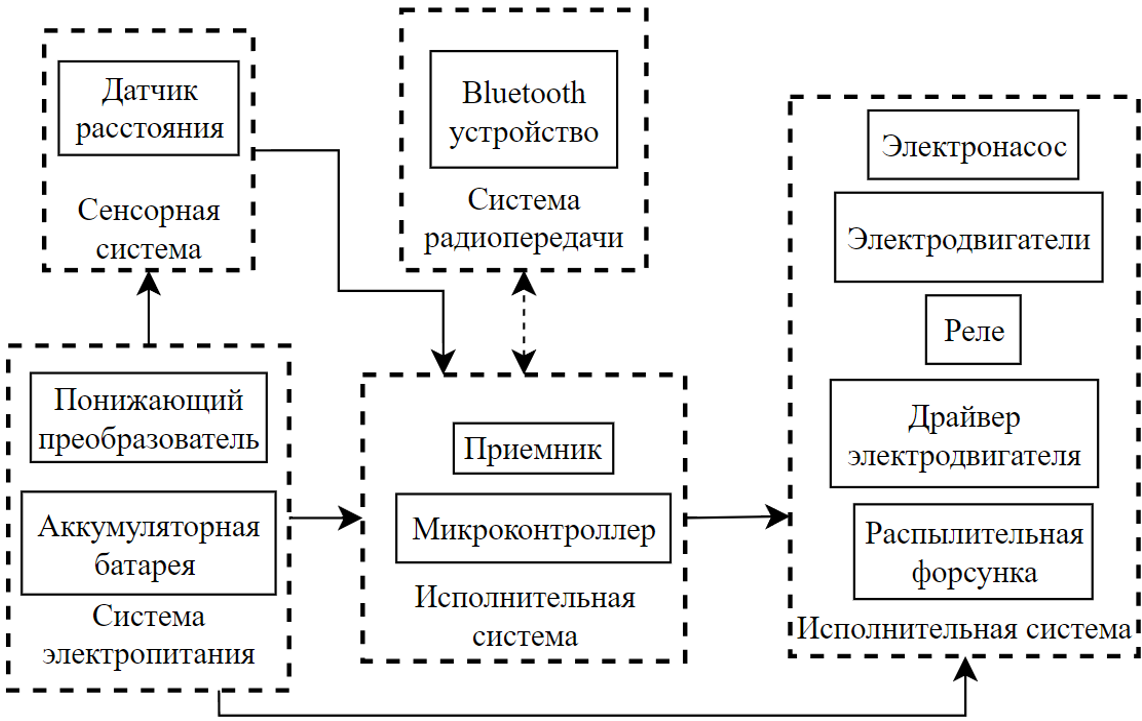
Разработанное устройство представляет собой мобильную платформу с автоматическим управлением, оснащенную тремя ультразвуковыми датчиками для определения препятствий на дороге. В основе конструкции лежит микроконтроллер ESP32, который управляет всеми устройствами. Для приведения электродвигателей в действие используются драйверы. Питание микроконтроллера и датчиков обеспечивается через понижающий преобразователь. Управление подачей краски осуществляется посредством реле, которое активирует электронасос, подающий краску из контейнера в распределительную форсунку.
Мобильная платформа управляется через мобильное приложение с использованием технологии Bluetooth. В приложении доступно управление движением робота и выбор режимов нанесения разметки, включая три типа линий:
Значимость такой мобильной платформы заключается в улучшении доступности и мобильности процесса разметки дорог. Применение подобных технологий позволяет сократить время выполнения работ, минимизировать вероятность ошибок, а также улучшить координацию между различными участниками дорожных работ, что в итоге способствует повышению общей эффективности и качества дорожного полотна. Кроме того, значительно снижается риск ошибок, связанных с человеческим фактором.